Robocup@Home
Smart Systems
Semester programme:Robotics
Research group:High Tech Embedded Software
Project group members:Jim Wanten
Jesse Gielen
Tijl Vasen
Project description
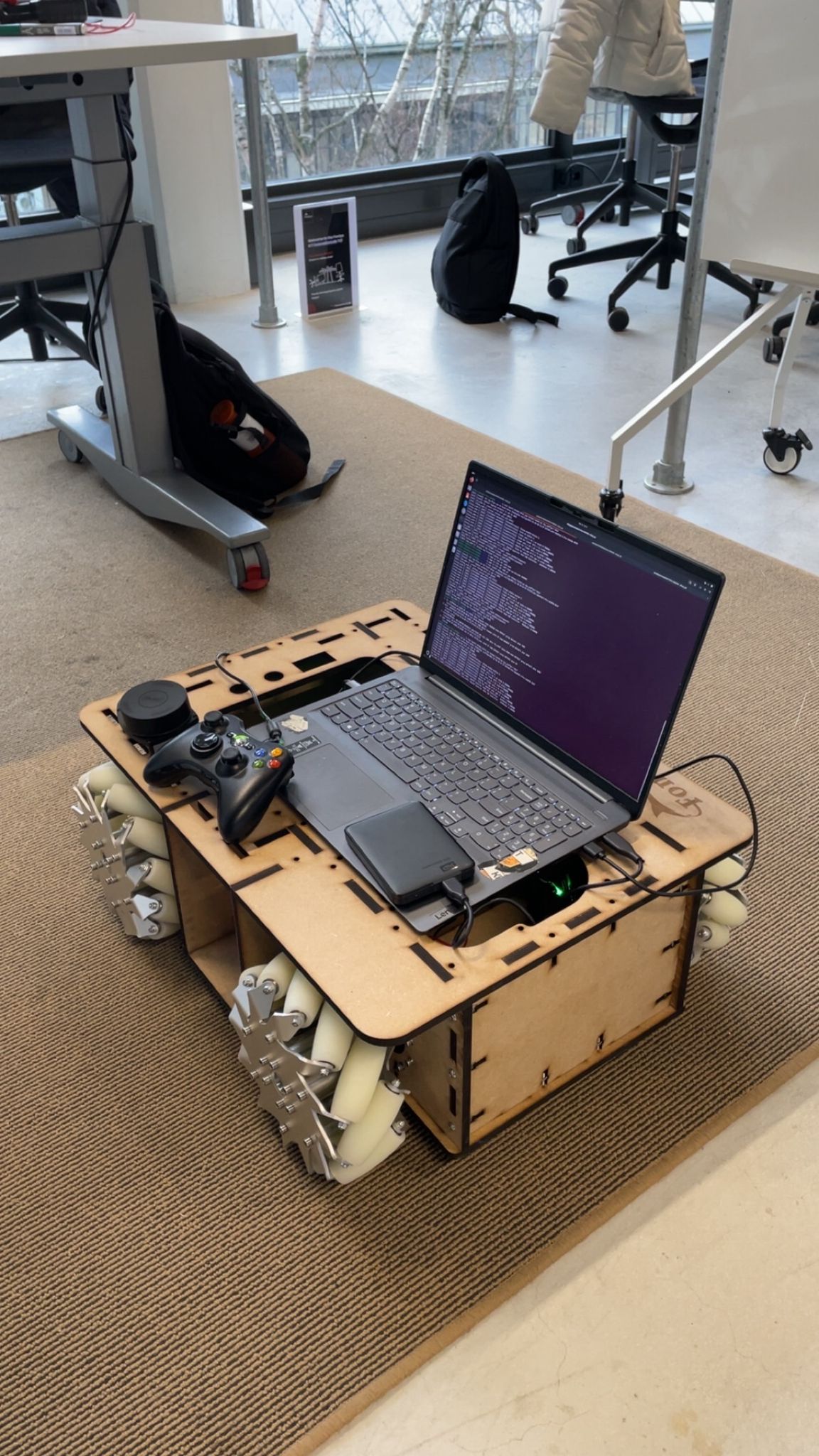
Our project focused on taking a robot that originally only existed in simulation and turning it into a real, working physical base. We built and configured the robot’s base so it could actually move around in the real world the same way it did in the virtual one. Alongside that, we started developing a full simulation of the robot arm that will eventually sit on top of the base.
Context
RoboCup@Home is a major league within the international RoboCup competition, focused on advancing domestic service robotics through realistic, home‑like challenges. Unlike controlled lab environments, RoboCup@Home places robots in dynamic, unpredictable settings where they must navigate, recognize objects, interact naturally with people, and perform everyday tasks. The league uses a series of benchmark tests to evaluate key capabilities such as human‑robot interaction, navigation and mapping, computer vision under natural lighting, object manipulation, and integrated autonomous behavior. Its goal is to accelerate the development of assistive technologies that could one day support people in their daily lives. By bringing together universities and research teams from around the world, RoboCup@Home fosters innovation, collaboration, and scientific exchange. As part of the broader RoboCup mission, the league serves as both a research platform and a competitive environment, pushing teams to develop robust, intelligent systems that move domestic robotics closer to real‑world application.
Results
The main outcome of our project is a fully functioning physical robot base that can reliably drive and be used for real‑world navigation testing. This is a major step forward, as it moves the system from a simulation‑only concept toward a working prototype.
The second outcome is the initial setup of the robot arm simulation. Although technical issues prevented full completion, we created a structured foundation that includes the arm model, joint configuration, and early motion‑planning attempts. Its value lies in the extensive documentation and troubleshooting notes we produced. These materials give the next project group a clear starting point and prevent repeated work.
Together, these outcomes create a strong base for future development: real‑world navigation can already be tested, while manipulation can continue to evolve in simulation.