Collaboration between Avular Origin and Drone
Smart Systems
Semester programme:High-Tech Embedded Software Engineering
Research group:High Tech Embedded Software
Project group members:Plamen Tsokov
Simoen Stoilov
Andrada Pancu
Gedewon Jerene
Project description
This project develops an autonomous search and rescue system integrating an Avular Origin One ground rover with an Orqa MRM1-5 quadcopter drone. The rover acts as a mobile base station and companion computer: it deploys the drone, uploads waypoint missions via MAVLink, and processes the drone's live analog video feed on board using a YOLO-based person detection pipeline. At each waypoint, the drone performs a 360° scanning rotation while the rover analyses frames for human presence.
Context
The project operates in the domain of public safety and emergency response, specifically supporting search and rescue (SAR) operations in outdoor environments where speed and area coverage are critical. Traditional SAR relies heavily on human personnel, which is slow and resource-intensive in large or hazardous terrain. Combining a ground rover with an aerial drone allows a single operator to cover significantly more ground while keeping personnel at a safe distance.
Results
The project produced a comprehensive set of technical deliverables across research, design, simulation, and software development, with physical hardware integration deferred due to drone hardware issues and component lead times encountered during the project period.
Extensive research was conducted into both hardware and software domains: MAVLink protocol capabilities, ArduPilot flight controller configuration, ESC and motor interfacing, FPV video pipeline options (USB UVC receivers, analog capture on Jetson), ROS 2 architecture patterns for rover-drone integration, and YOLO-based person detection feasibility on embedded hardware. Hardware components were identified, specified, and ordered.
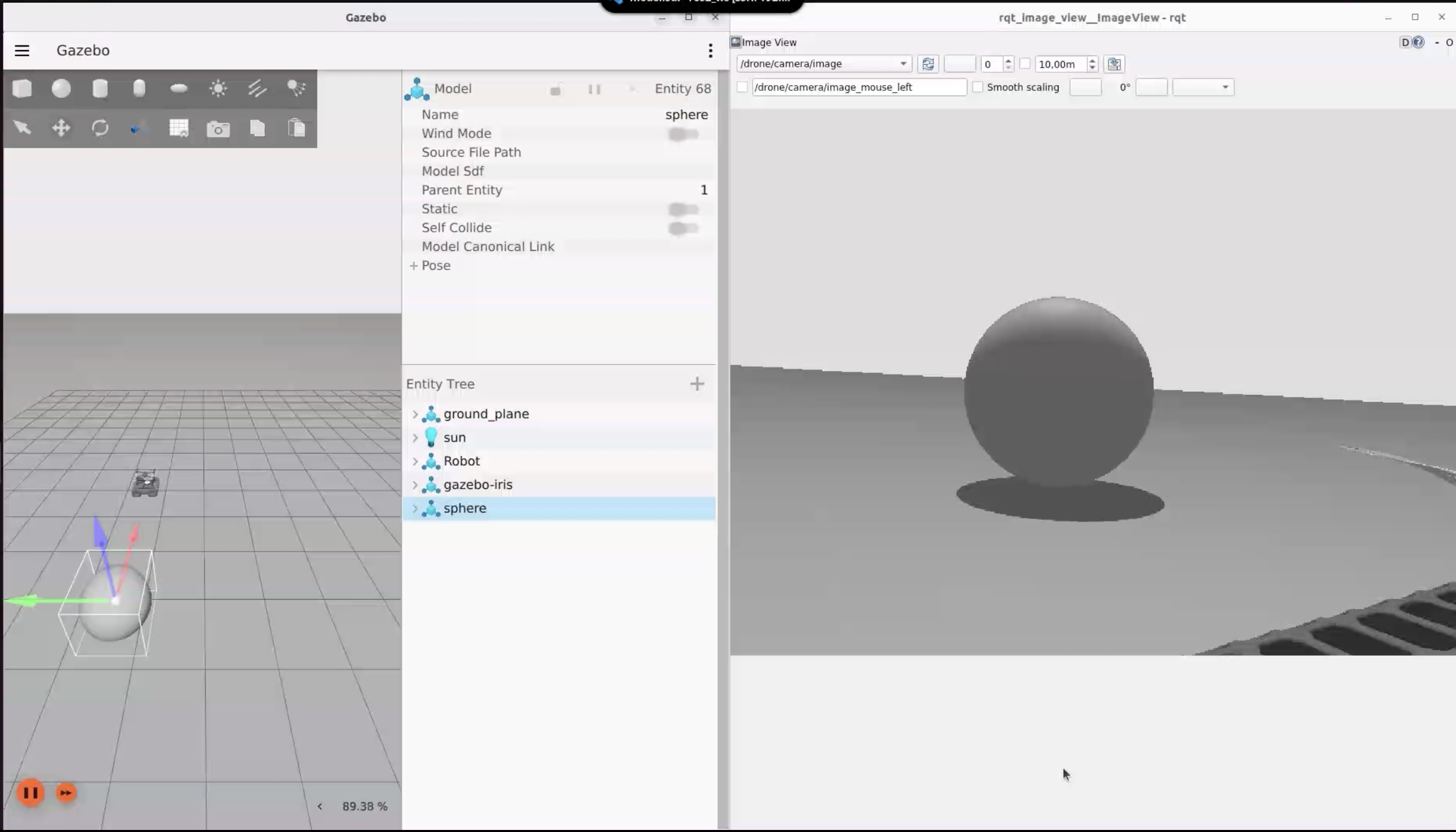
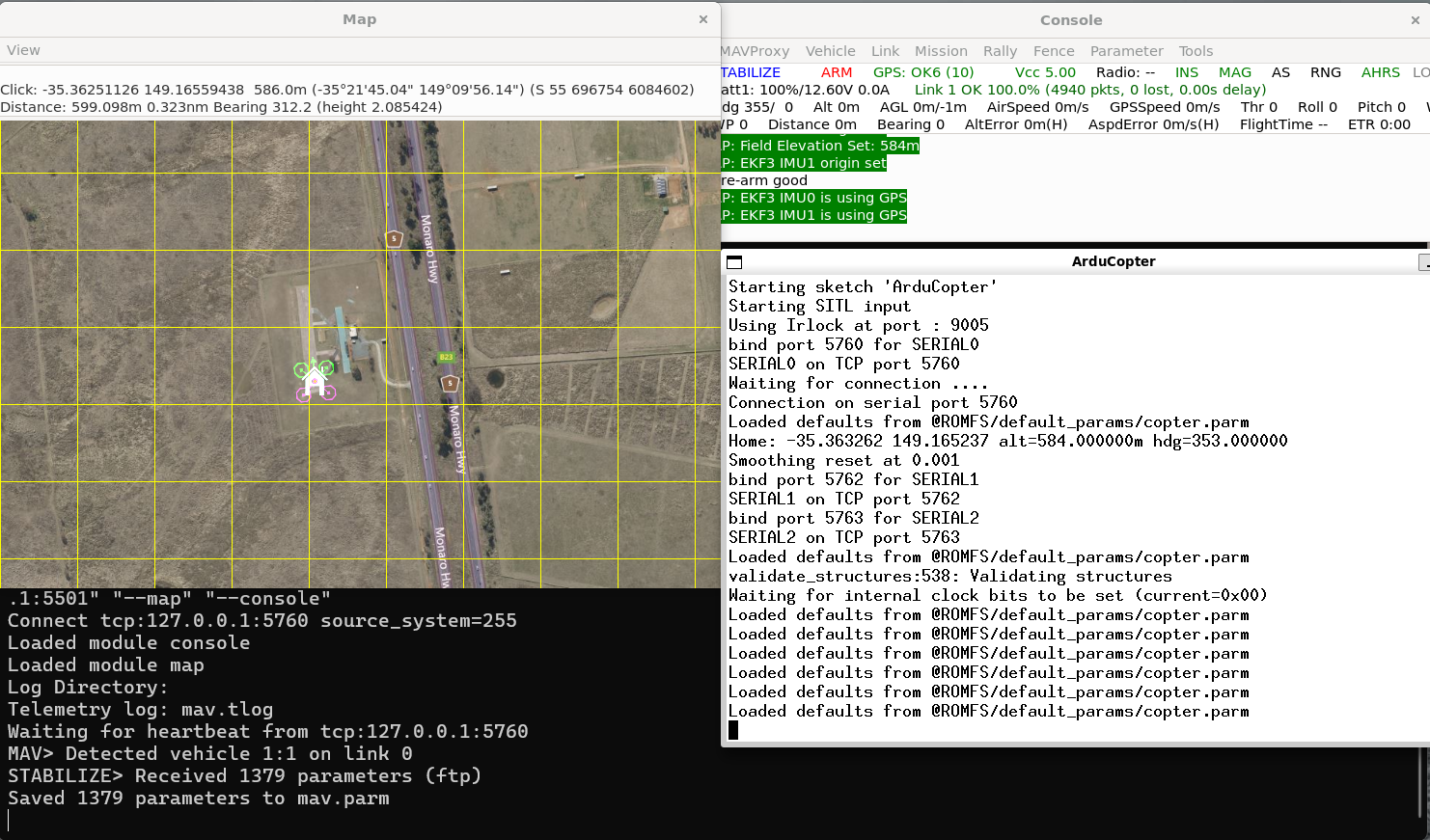
A fully working ArduPilot SITL simulation environment was established on Ubuntu, validating the complete drone mission flow in software: autonomous takeoff, multi-waypoint navigation, and 360° scanning rotations at each waypoint. MAVLink communication between a MAVLink-based companion computer script and the simulated drone was fully implemented and tested, covering arming, mode switching, mission upload, and telemetry feedback.
System documentation was completed to a professional standard: a MAVLink feasibility analysis, functional and non-functional requirements, C4 architecture model, sequence diagrams for the full operator-to-vehicle mission flow, and component diagrams for the ROS 2 and MAVLink layers, as well as a comprehensive and interactive Figma architecture diagram and many more.
A TypeScript operator frontend was implemented, featuring live feed display, telemetry panels, a YOLO detection gallery, and mission file upload.
Individual system components are each validated in isolation.
The project is positioned at TRL 3–4: core concepts are analytically and experimentally validated, with full hardware integration as the defined next phase pending resolution of the drone platform issues.
About the project group
Plamen - Born in Bulgaria, 3rd year Fontys Student, currently in the advanced semester (High Tech Embedded Software Engineering). Internship completed at Delta Electronics.
Andrada - Born in Romania, 4th year Fontys Student, currently in the advanced semester (High Tech Embedded Software Engineering). Internship completed at ASML.
Gedewon - Born in Ethiopia, 4th year Fontys Student, currently in the advanced semester (High Tech Embedded Software Engineering). Internship completed at Smart Photonics.
Simeon- Born in Bulgaria, 3rd year Fontys Student, currently in the advanced semester (High Tech Embedded Software Engineering). Internship completed at Sunterra.