OpenRemote Fleets
Project description
The project focused on designing and building a fleet management interface around OpenRemote. The main design challenge was: how can fleet operators monitor vehicles, tracker data, routes, alerts, and reports in one clear operational workspace? The solution is a map-first React application that supports live vehicle status, route playback, alerts, asset inspection, graphs, reports, preferences, and a wall display. It also supports both real OpenRemote Manager data and a mock mode for demonstrations and testing.
Context
The project is situated in the smart mobility and fleet operations domain. Fleet operators need reliable insight into vehicle locations, tracker health, route history, telemetry, and operational alerts. The application connects to OpenRemote Manager and uses Teltonika tracker data, including GPS location, speed, ignition, movement, battery, fuel, GSM/GNSS quality, odometer, and other telemetry values. Because real hardware is not always available during development, the project also includes a Teltonika FMC003 emulator and mock data mode. This allowed the team to test realistic fleet behaviour, route playback, alert states, reports, and dashboard features without depending fully on physical trackers.
Results
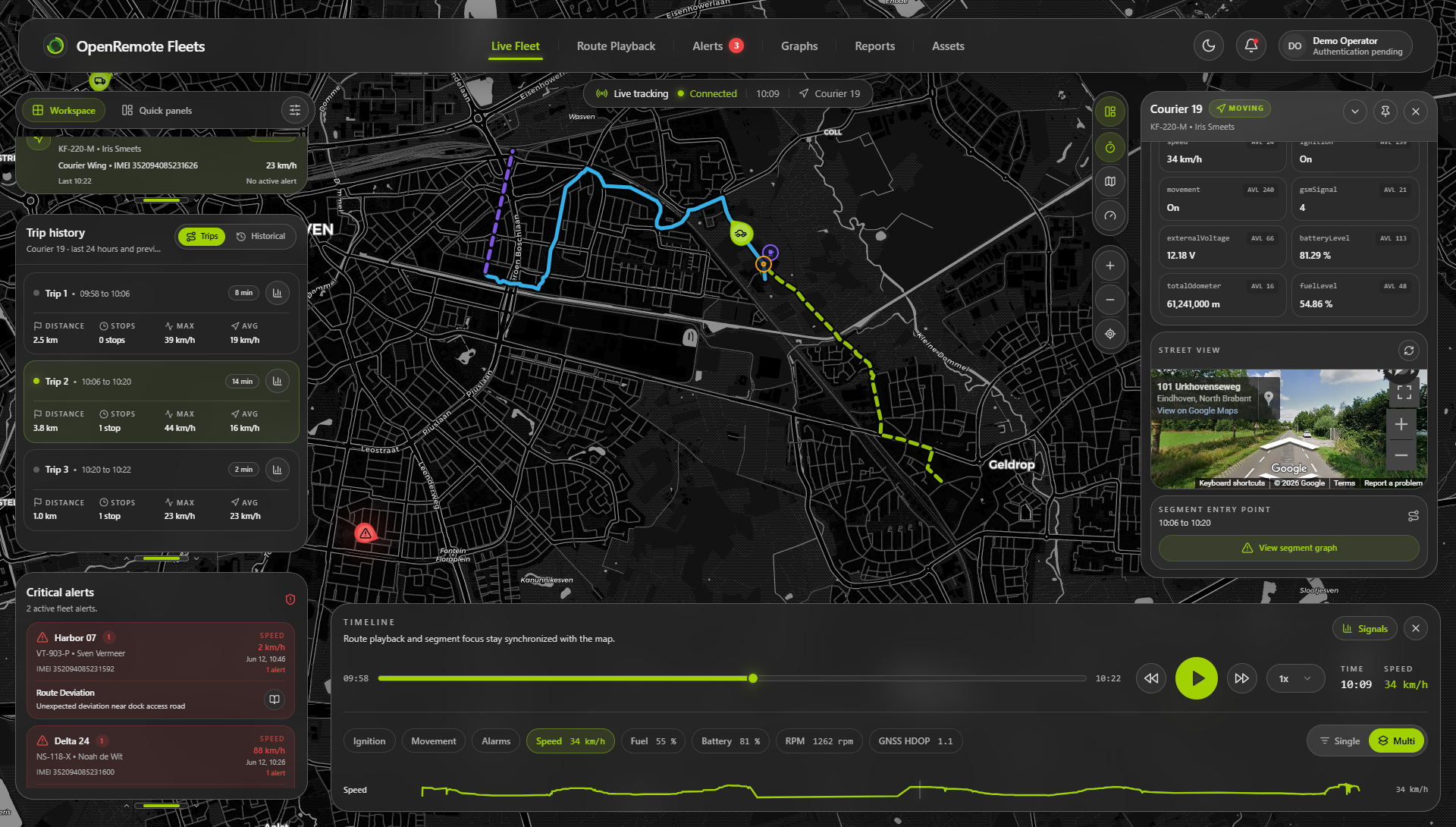
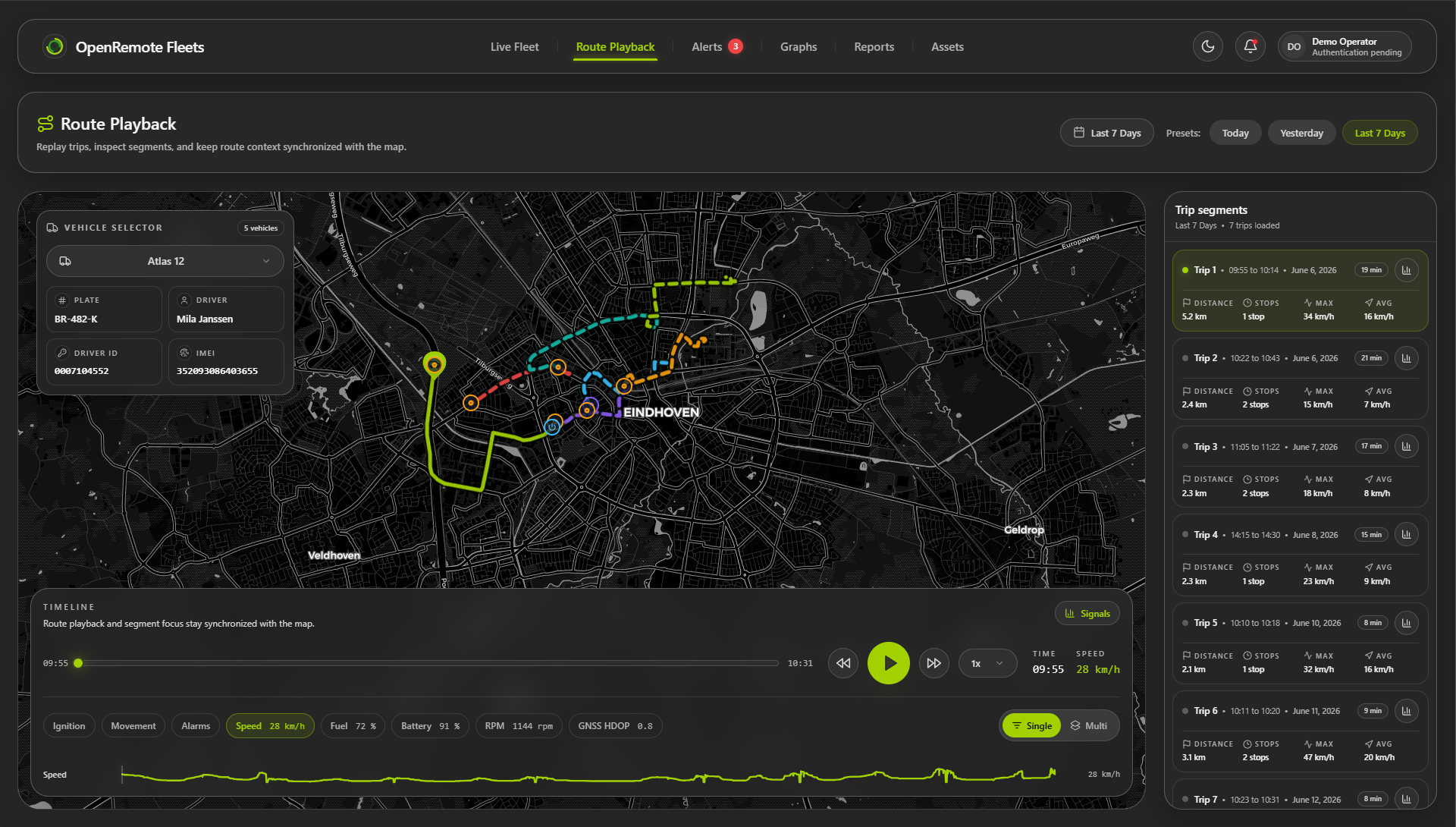
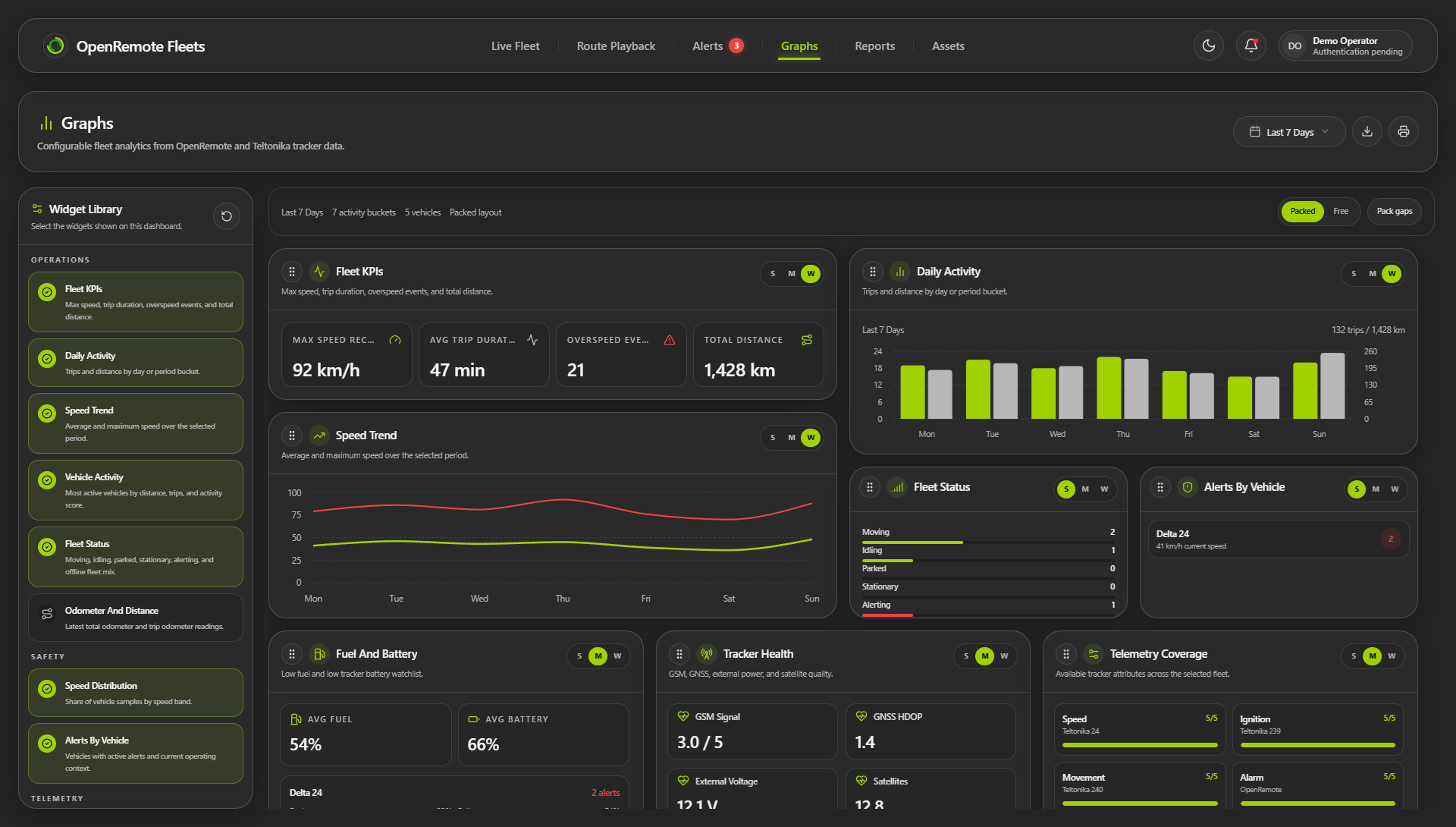
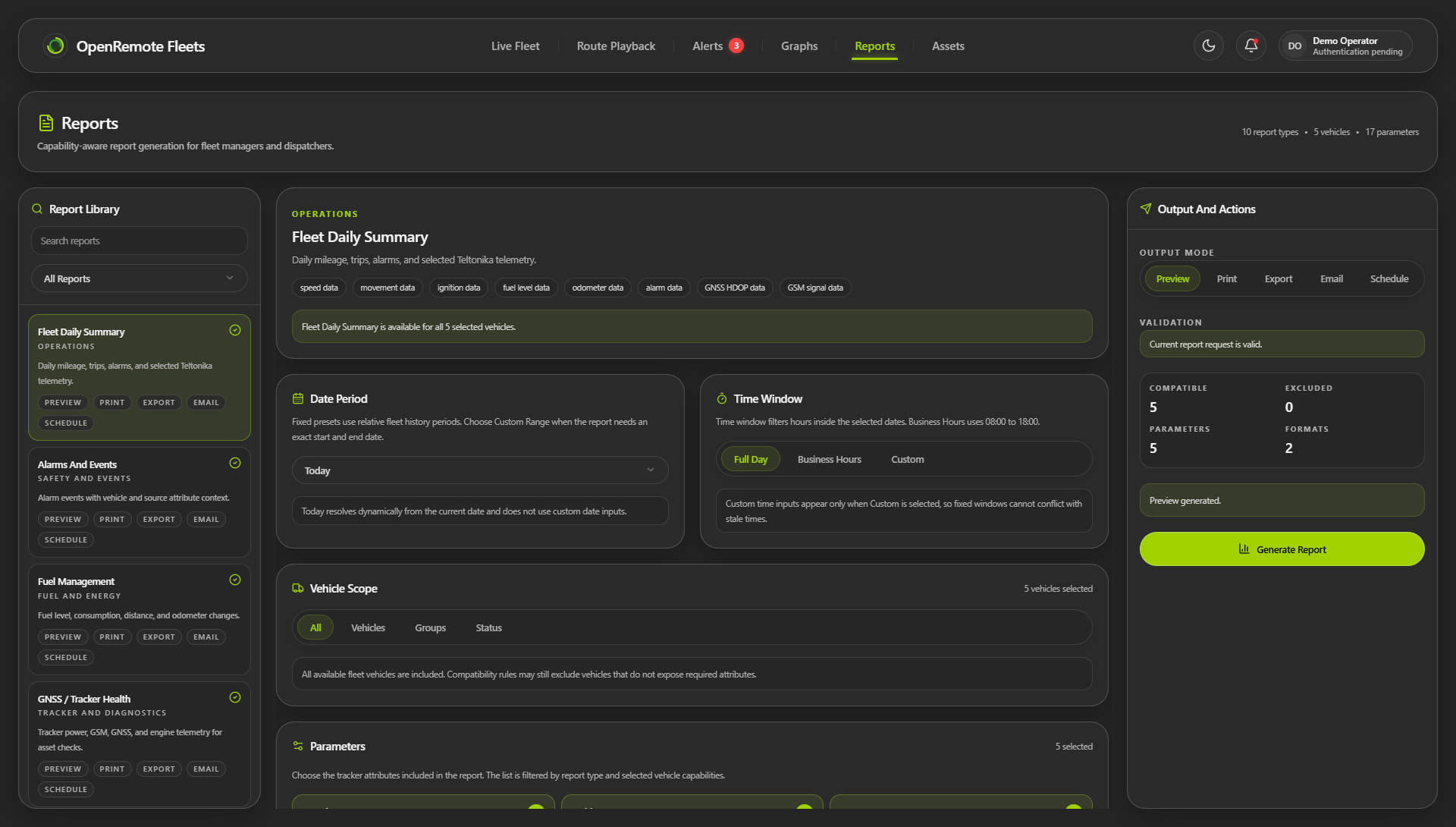
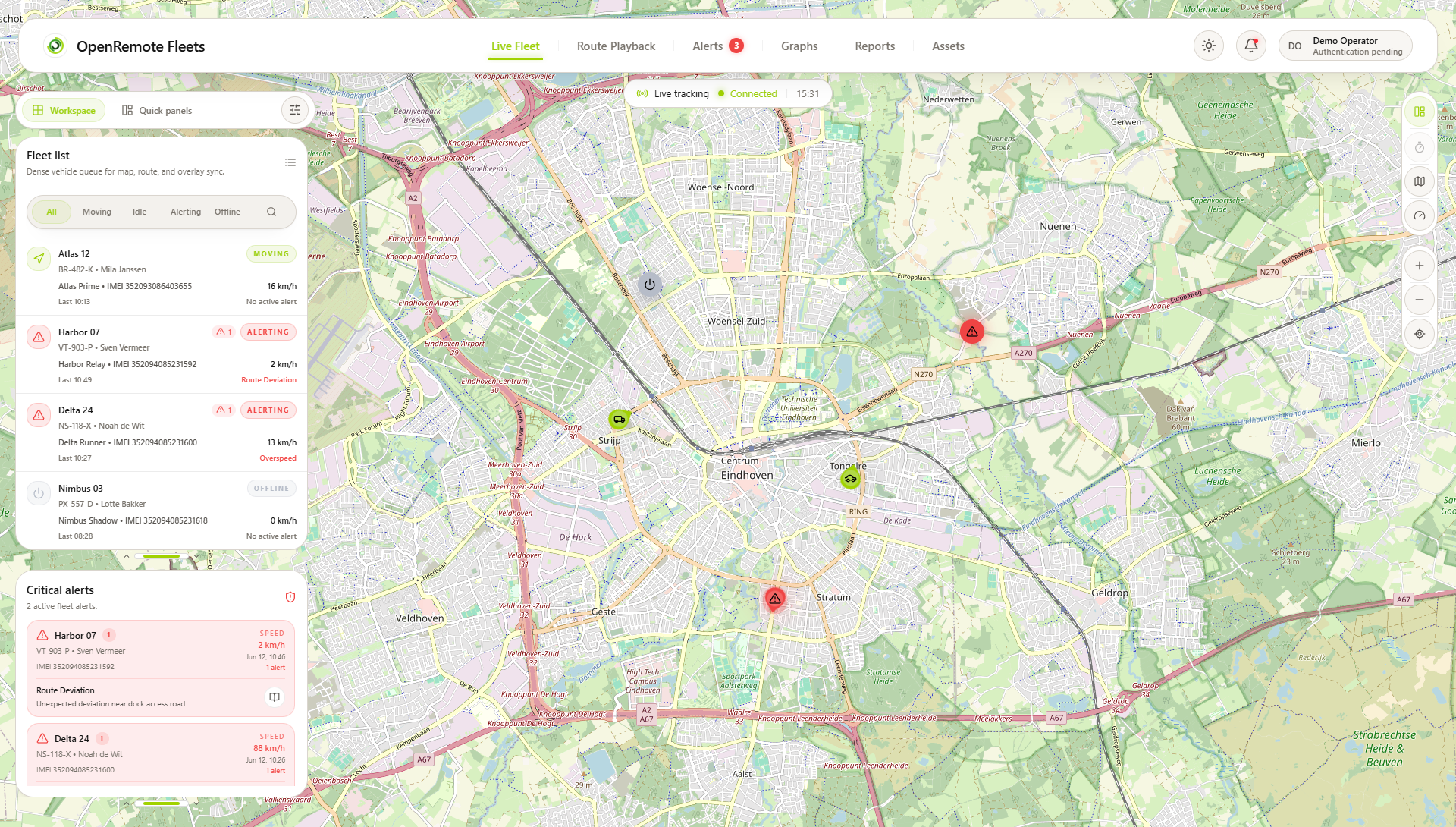
The main result is a working OpenRemote Fleets application. It provides a map-based live fleet workspace where vehicles can be monitored through status markers, selected-vehicle overlays, telemetry cards, route history, timeline playback, alert context, and quick panels. Separate pages support alerts, asset and tracker inspection, graphs, reports, preferences, route playback, and wall display use.
A second important result is the technical integration structure. The application separates React UI, domain models, repositories, and OpenRemote infrastructure code. This makes it possible to run the same interface in real mode with OpenRemote Manager and Keycloak, or in mock mode with local fixtures. The Teltonika emulator adds extra validation value because it can simulate realistic tracker data through OpenRemote without needing physical hardware.
The project was validated through automated tests, type checks, mock demonstrations, documentation, real-mode integration paths, and deployment of the application. The result is a deployed fleet management demonstrator with the main workflows implemented and testable in a realistic environment. Its TRL positioning is around a working prototype or pilot-ready demonstrator: the core functionality is available, integrated, and deployed, while further work could still focus on long-term operational validation, production hardening, and testing with a larger set of real vehicles and users.
About the project group
I have a strong background as a full-stack developer and several years of professional experience in the software field. Because of this, I am comfortable working across frontend, backend, integration, testing, and documentation tasks. I worked on this project individually and approached it iteratively: first researching the OpenRemote and Teltonika domain, then designing the architecture, implementing the fleet management features, validating the result, and improving the application based on testing and feedback.
Video
https://fleets.shevok.dev