Vehicle2Grid
Open Learning
Semester programme:Open Learning/Innovation
Client company:Bas Koeten Racing
Project group members:Nedyalko Tenev
Nikita Tsera
Aleksandar Popov
Project description
This project focuses on developing a Vehicle-to-Grid (V2G) system that enables bidirectional charging - allowing electric vehicles to not only charge from the grid but also discharge energy back into it.
The aim is to help users reduce electricity costs, manage power intelligently, and create a sustainable energy system.
Context
The main stakeholder of this project is Bas Koeten, owner of Bas Koeten Racing, who has provided us with his Polestar 2 specifically for this research initiative. The car is housed at Fontys Automotive, where students from the Minor Electric Drive program have been working on developing the V2G setup. Our ICT team joined the project to support them in areas of software development, hardware integration, and system design, creating a full-stack solution that communicates between vehicle hardware and user-facing software.
Results
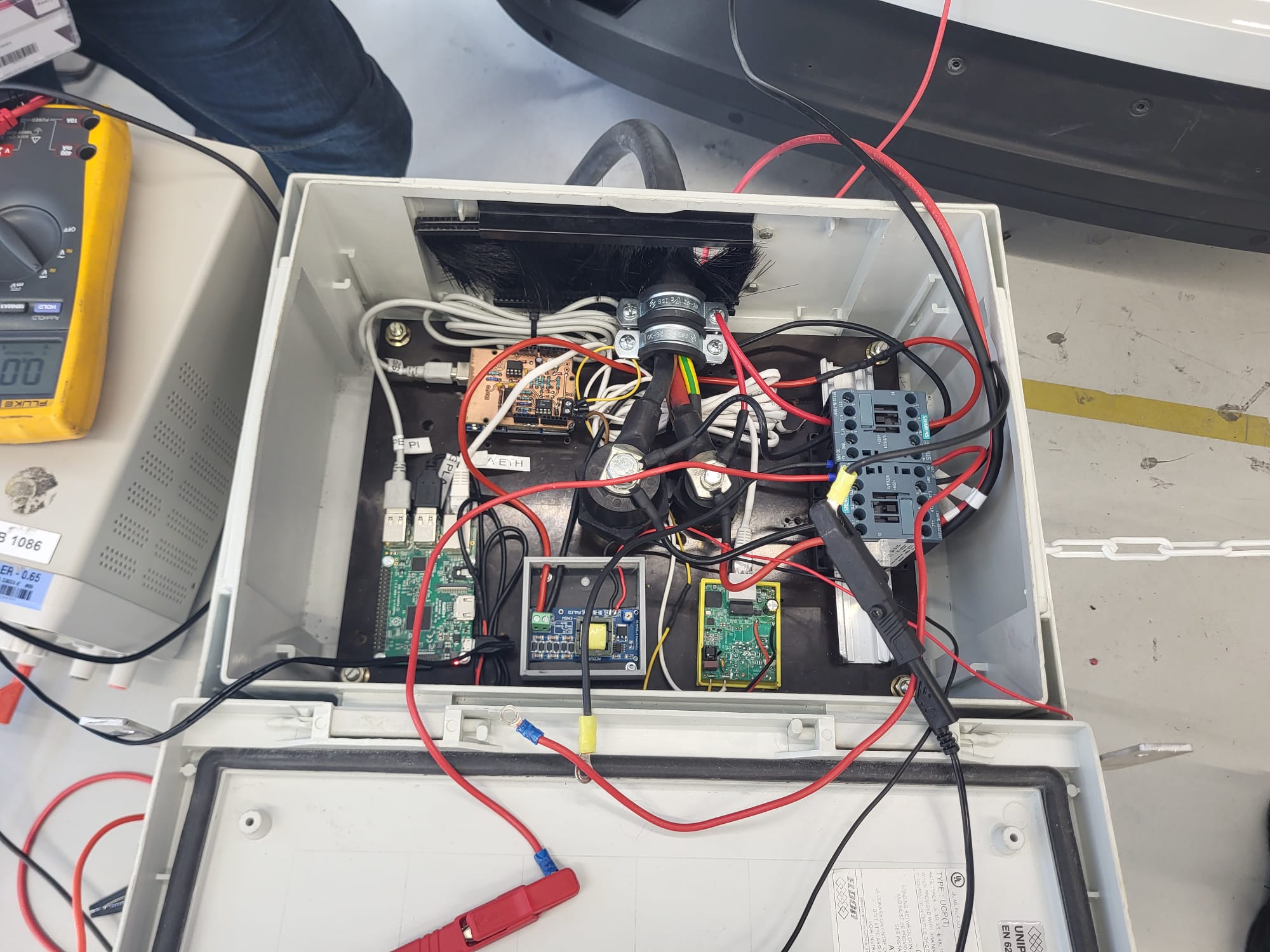
Our project successfully delivered a functional Vehicle-to-Grid (V2G) prototype demonstrating bidirectional energy control between an electric vehicle (Polestar 2) and a simulated grid environment. The system integrates a Raspberry Pi running ISO 15118 communication software (OpenV2Gx), an Arduino-based EVSE controller for precondition signaling, a powerline communication interface, and a high-voltage switching circuit.
The prototype negotiates charging with the EV and simulates energy discharge toward a grid-connected inverter. We validated successful session initialization, relay control, and current direction switching. This confirms that low-cost, modular V2G systems can be prototyped using accessible hardware and open-source software.
Key insights include the complexity of aligning communication protocols with real-time hardware switching and the challenge of testing high-voltage scenarios safely. The modular architecture supports further development such as inverter integration, Ul feedback, and grid-sync algorithms.
We position this system at Technology Readiness Level 5 (TRL 5), as all core subsystems have been integrated and tested in a relevant environment, with successful interaction between car, controller, and inverter simulation.


{kind=link}
{kind=link}