Autonomous vehicle communication
Future Software Technologies
Semester programme:Minor Signals and Embedded Systems
Project group members:Paul Todorov
Kenneth Boakye-Buah
Yordan Mitev
Berend Pijnenburg
Project description
Considering the current architecture, what system and network design for a CAN-bus would be best to grant the BRUM the ability to easily work with CAN devices bought off-the-shelf?
Context
Part of the Dutch Self Driving Challenge, the so-called BRUM is Fontys' ?? in the contest. The vehicle is currently using Ethernet as its low-level communications protocol for its ECU modules and our goal is to design infrastructure for CAN-bus integration.
The motivation for this additional bus is the fact that it's the most commonly seen standard in real vehicle communications.
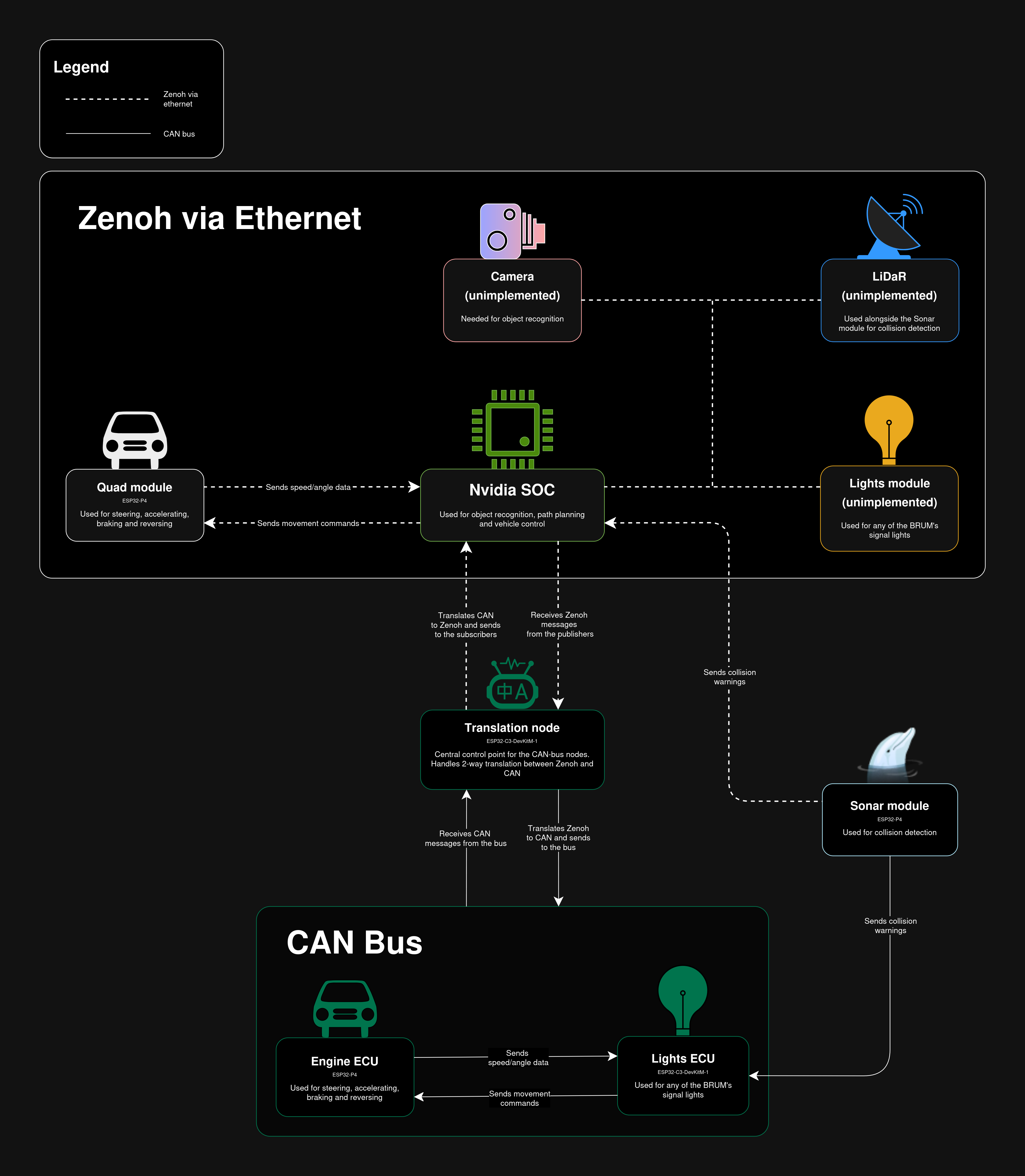
Results
Design for integration of the CAN-bus on the vehicle without the need to replace or reprogram any currently existing parts.
We have a small demo with some ECUs that we made to showcase an example of our new comms architecture, with translation between the BRUM's current standard protocol (CAN <--> Zenoh translation)